Blogs
LiDAR Mapping and its Applications
A case study of LiDAR Survey in Nepal
LIDAR, which stands for Light Detection and Ranging, is a remote sensing method that uses light within the style of a pulsed laser to live ranges (variable distances) to the Earth. These light pulses combined with other data recorded by the airborne system generate precise, three-dimensional information about the form of the object and its surface characteristics. A LiDAR instrument principally consists of a laser, a scanner, and a specialized GPS receiver. Airplanes and helicopters are the foremost commonly used platforms for acquiring LiDAR data over broad areas. LiDAR systems allow scientists and mapping professionals to look at both natural and man-made environments with accuracy, precision, and suppleness. Geoscientists are using LiDAR to supply more accurate shoreline maps, make digital elevation models to be used in Geographic Information Systems to help in emergency response operations, and in many other applications. While it was first utilized in the 1960s when laser scanners were mounted to airplanes, LiDAR didn’t get the recognition it deserved until twenty years later. It was only during the 1980s after the introduction of GPS that it became a well-liked method for calculating accurate spatial measurements. Now that its scope has spread across numerous fields, we should always know more about LiDAR mapping technology and the way it works. What's LiDAR technology, and how does it work? Here are some insights about it that are good to grasp.
LiDAR Technology
According to the American Geoscience Institute, LiDAR uses a pulsed laser to calculate an object’s variable distances from the layer. These light pulses put along with the knowledge collected by the airborne system, generate accurate 3D information about the Earth's surface, and therefore, the target object. There are three primary components of a LiDAR instrument, the scanner, laser, and GPS receiver. Other elements that play a significant role within the data collection and analysis are photodetector and optics. Most government and personal organizations use helicopters, drones, and airplanes for acquiring LiDAR data.
Types of LiDAR Systems
• Airborne LiDAR
Airborne LiDAR is installed on a helicopter or drone for collecting data. As soon as it’s activated, Airborne LiDAR emits light towards the bottom surface, which returns to the sensor immediately after hitting the objects, giving an actual measurement of its distance. Topological LiDAR typically uses a near-infrared laser to map the land.

LiDAR sensor mounted Helicoptor
• Terrestrial LiDAR
Unlike Airborne, Terrestrial LiDAR systems are installed on moving vehicles or tripods on the surface for collecting accurate data points. These are quite common for observing highways, analyzing infrastructure, or maybe collecting point clouds from within and out of doors of buildings. Terrestrial LiDAR systems also have two types; Mobile LiDAR and Static LiDAR.
How is LiDAR data collected?
When an airborne laser is pointed at a targeted area on the bottom, the beam of light is reflected by the surface it encounters. A sensor records this reflected light to live a spread. When laser ranges are combined with position and orientation data generated from integrated GPS and Inertial Measurement Unit systems, scan angles, and calibration data that results in a dense detail-rich group of elevation points called a “point cloud”. Each point within the point cloud has three-dimensional spatial coordinates (latitude, longitude, and height) that correspond to a selected point on the layer from which a laser pulse was reflected. The purpose clouds are accustomed to generate other spatial products, like digital elevation models, canopy models, building models, and contours. Given the speed at which the light travels (approximately 186,000 miles (299,337.98 km) per second). The method of measuring the precise distance through LiDAR appears to be incredibly fast. However, it’s very technical. The formula that analysts use to make the precise distance of the item is as follows:
The distance of the object from the sensor = (Speed of Laser beam x Time of Flight)/ 2.
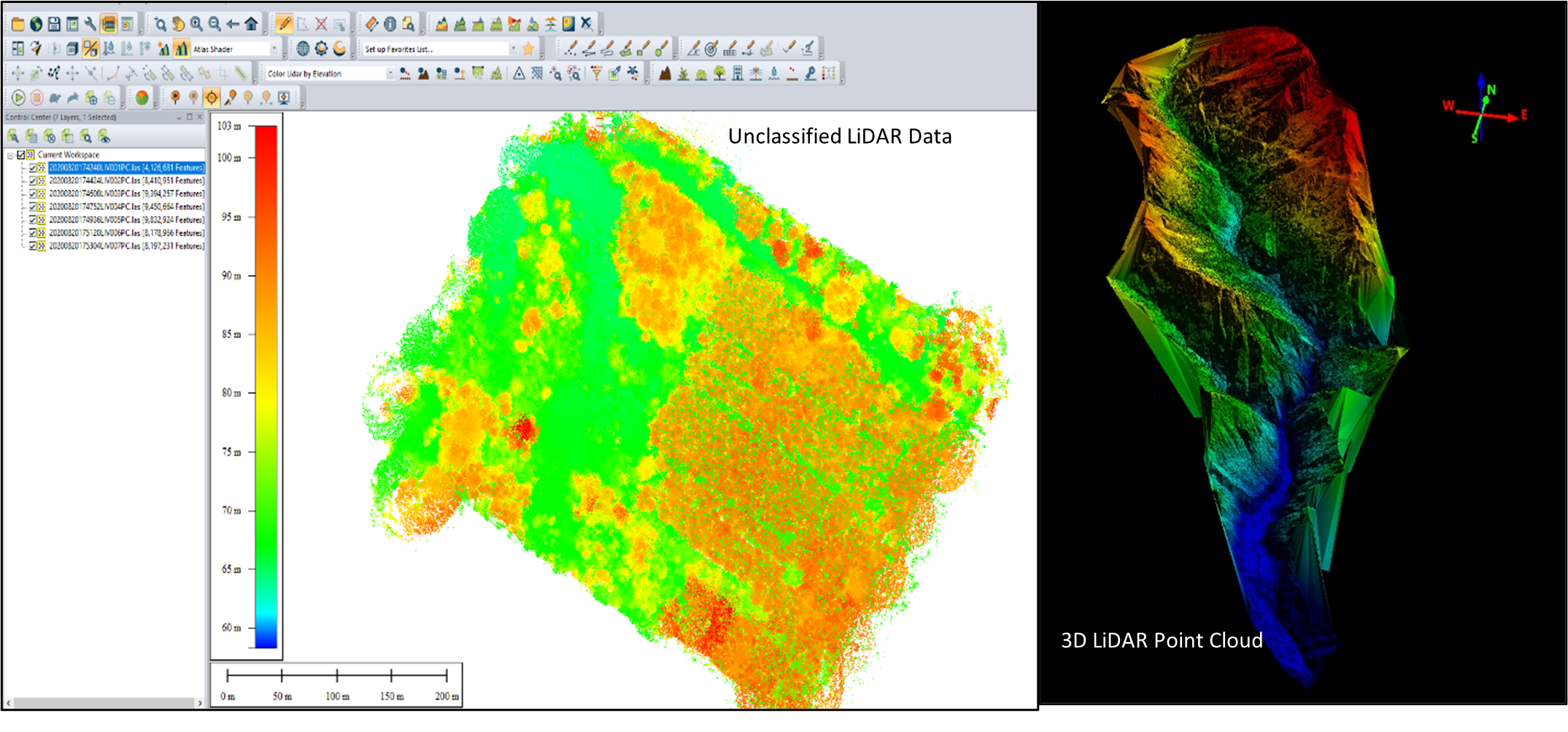
Raw LiDAR Point Clouds
Application of LiDAR
Application of LiDAR is used to accomplish many developmental objectives, a number of which are:
• Digital Elevation or Terrain Model
Terrain elevations play an important role during the development of roads, large buildings, and bridges. LiDAR technology has x, y, and z coordinates, which makes it incredibly easy to provide the 3D representation of elevations to make sure that concerned parties can draw necessary conclusions more easily.
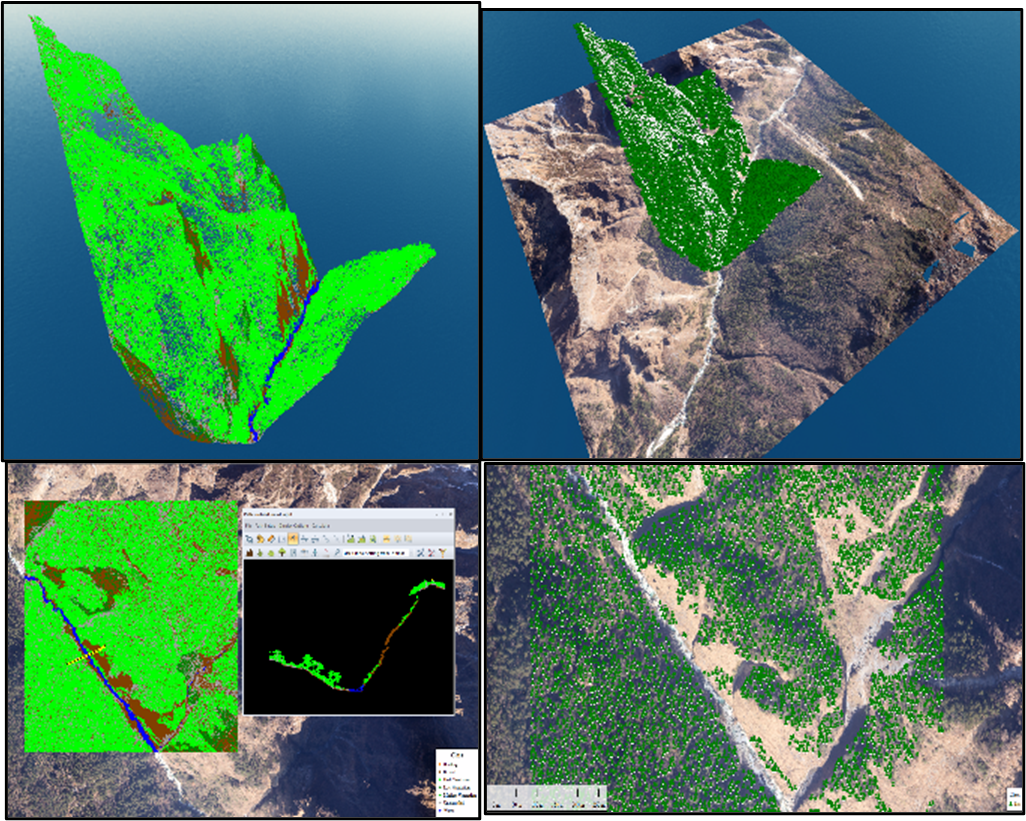
Classified LiDAR Point Clouds
• Photogrammetry and 3D Modelling
Photogrammetric data can be an alternative method to LiDAR point clouds to reconstruct 3D building because some photogrammetric software can derive density point clouds using image matching. Furthermore, 3D city model generation is still an open research issue that is demanded and interesting for many areas. Besides, it is a timely topic for many researchers, who are trying to increase the automation and reliability of this process.
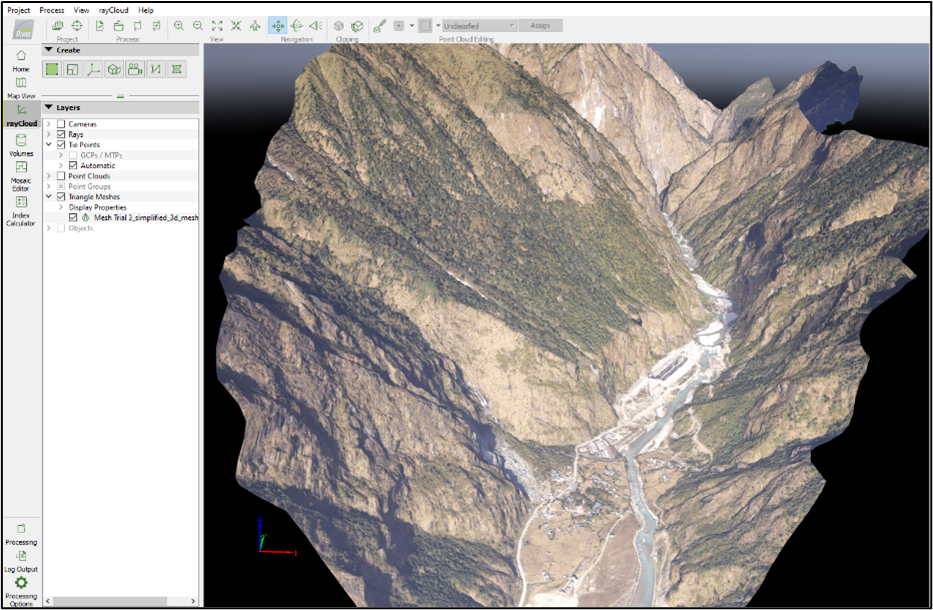
3D Surface model in Global Mapper
Apart from the applications mentioned above, LiDAR is employed by geoscientists for unearthing geomorphology related secrets, also as by the military for polishing off various security operations near the national borders.
Study Area, Methodology, Data Description and Processing Software
Study Area
Lapche Khola is a glacier river which originates from Upper Lapche, Tibet. The study area starts from Lamabagar and ends at Lower Lapche. The geographical coordinates and the altitude, with reference to the sea level, approximate where is located are 28.012609° N, 86.198417° E and 3363 m respectively. At the time of the 1991 Nepal census it had a population of 1688 people living in 354 individual households. Lamabagar is a village development committee in Dolakha District in the Janakpur Zone of north-eastern Nepal. This location is selected for study after the successful completion of LiDAR survey for Lapche Khola Hydropower Link Road from Lamabagar to Lapche. It is also one of very few LiDAR Survey carried out in Nepal for organizational use.
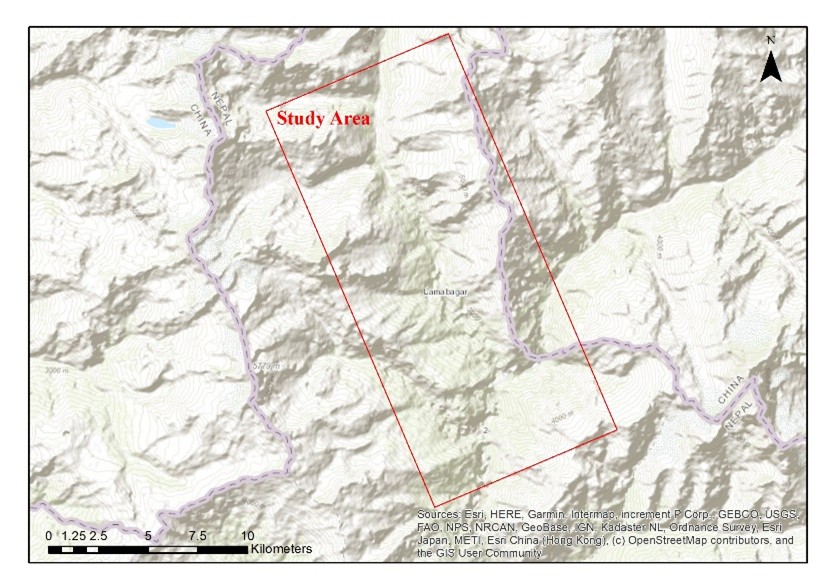
Lapche Khola Corridor
Methodology
• Laying Out Ground Control points
Ground Control Points (GCPs) are defined as points on the surface of the earth of known location used to geo-reference the aerial imagery. Laying out GPC for LiDAR Survey is also an important factor for more accurate geo-rectified images. In this study, Post Processing Kinematics (PPK) techniques was used to establish the ground control for geo-referencing the Orthophotos more accurately. PPK is the method of DGPS survey in which a DGPS receiver is set to log in for desired time period in some specific locations and allow the GPS receiver to collect the geo-locational data for that time period. Basically, GCP for LiDAR Survey are established in such locations where the points can be visible from UAV or can be identified easily in Imageries taken during the flights. For example, Building Top, Road Edge, etc. are good location to have GCP established.
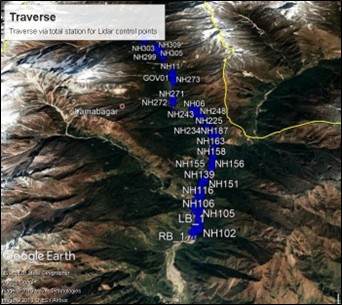
GCPs established for georeferencing and flight planning
• LiDAR Flight
After the successful establishment of GCPs, systematic flight planning is done using Planning Applications. This process requires adequate information about the terrain and geo-features. Once the planning is done the flight plan is fed into the LiDAR flight system and the data collection process is carried out.
• Data Processing
The LiDAR data and the imageries taken from certain altitude was then processed in Global Mapper especially for LiDAR Point Cloud Classification and DSM generation. Also, Pix4D Mapper was also used to prepare geo-rectified mosaic of the aerial imageries also known as the Orthophotos. After the generation of DTM the Road Designing work was done using AutoCAD Civil3D.
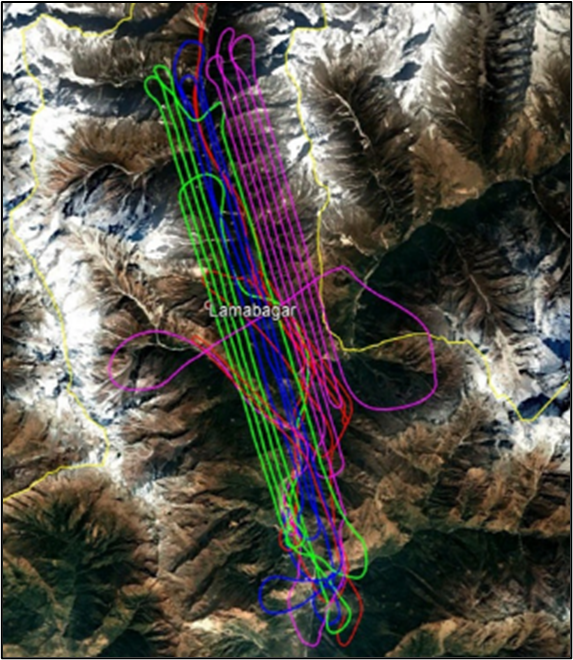
LiDAR Flight Path
• Ground Truthing
Ground truthing and the collection of ground-truth data on location enables calibration of remote-sensing data, and aids in the interpretation and analysis of what is being sensed. In this project, field-based ground-truthing validation of all GCPs information for the areas was conducted in which all reported locations were visited and validated for locational accuracy and operational status.
Data
For this study, point clouds (or DSM), and Orthophotos had been used. The DSMs that was generated from LiDAR flight data (1.5 x 1.5 km tiles) at 10 cm DSM resolution.
Software
The initial processing of LiDAR point clouds was done in Global Mapper v21.0 where the point clouds were classified in different class as Building, Ground, Water, Bare land etc. After classification of the point clouds Digital Terrain Model (DTM) was generated for further use. Similarly, Pix4D Mapper is used for Orthophotos generation and 3D Modelling of the study area. ArcGIS Desktop 10.5 has also been used for further processing of coordinate system and projection.

Digital Surface Model generated from LiDAR Point Clouds